1. batch梯度下降法(简称梯度下降法)
cost function(即代价函数或成本函数)一般为凸函数,那么什么是凸函数呢?
下面介绍数学知识:
凸函数的定义:
对区间$[a,b]$上定义的函数$f$,若对于区间中的任意两点$x_1,x_2$,均满足:
\[f(\frac{x_1+x_2}{2}) \leq \frac {f(x_1)+f(x_2)}{2}\]则称函数$f$为区间上的凸函数,大致图像为U型曲线,类似函数$f(x)=x^2$都为凸函数。
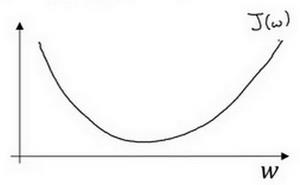
Ps:$J$函数一般指成本函数,即cost function。
判别凸函数的方法:
实数集上的函数,可通过二阶求导判断:
- 若二阶导数在区间上非负,为凸函数
- 若二阶导数在区间恒大于0,则为严格凸函数
数学介绍完毕,可略过。
梯度下降的本质就是不断循环的做下面的公式:
\[w:=w-\alpha \frac{dJ(w,b)}{dw},b:=b-\alpha \frac{dJ(w,b)}{db}\]此处我们将$w$看成一维的,$\frac{dJ(w,b)}{dw}$就是指代梯度,也叫作斜率,也是导数。
梯度下降就是不停的使用上式更新参数,具体更新方式就是使用原有的参数值减去梯度(斜率、导数),在减去梯度时,为了使更新粒度可控,加上一个$\alpha$超参数,这就是梯度下降过程的分析与原理。
对于一些刚接触的人来说,不明白的地方就是为何减去梯度,此处我们对减去梯度的方式进行分类验证。
- 假如当前点在最优点的右方,函数图像如下:
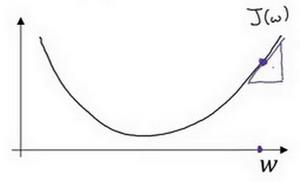
即上图三角形所在的位置,此处的梯度,我们理解为斜率可以通过高除以宽来计算,此处高为正值,宽为正值,因此斜率为正值(导数),通过公式2计算,那么参数$w$应该减小。
不断重复上述过程,当前点将会缓缓移动至凸函数的最低点,即最优点。
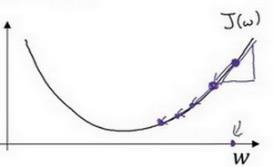
- 假如当前点在最优点的左方,函数图像如下:
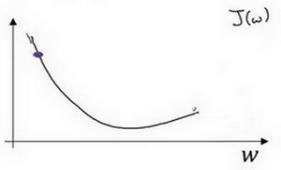
此处的斜率是负的,我们来分析一下。在此处曲线呈下降趋势,因此高为负的,宽依旧为正的,因此斜率为高除以宽,斜率为负数。根据公式进行计算,减去导数,因此参数应该变大,向右方移动,也是缓缓接近最低点,即最优点。
以上是对单个参数$w$进行分析。
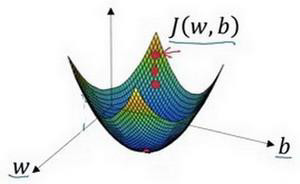
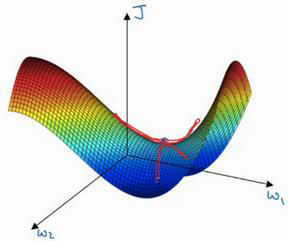
假如当前我们的样本属性数量为1,那么我们的模型应该包含$w,b$两个参数,我们的参数更新的模型应该处于三维中,图像如下:
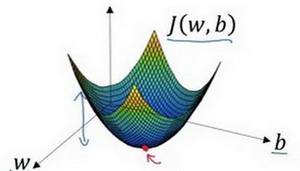
红点即为最优点,参数分别为$w$,$b$,成本函数为$J(w,b)$。
从二维到到三维,公式2同样适用,按照梯度的方向不断前进,最终会收敛到最优点或者最优点附近。
注意,以上分析中,总会有一个函数,即成本函数$J(w,b)$,成本函数究竟是什么呢?
成本函数公式如下:
\[J(w,b)=\frac{1}{m}\sum_{i=1}^{m}L(\hat y^{(i)},y^{(i)})\]在公式3中,$m$代表样本数量,$L$代表损失函数(评估预测值和实际值之间有多接近),$\hat y$代表模型的预测值,$y$代表实际值,$i$代表样本序号。
如果在深度学习中,我们使用公式3进行模型的训练与更新,那么实际上每遍历一次样本(数量为m),我们进行一次更新,即每epoch进行一次更新。
但是,思考一个问题,如果样本的数量很大,假如有100万个,那么更新一次样本是否太过耗时呢?
2. 随机梯度下降(Stochastic gradient descent,即SGD)
既然每次训练需要使用全部的样本太过耗时和损耗资源,那么我们可以每次使用一个样本进行更新,公式3改写为:
\[J(w,b)=L(\hat y^{(i)},y^{(i)})\]可以发现,公式4相当于公式3的简化,在随机梯度下降中,我们直接使用损失函数作为成本函数,然后再使用公式2进行$w,b$的更新。
使用1个样本和使用$m$个样本更新参数,除了能够减少耗时和资源意外,还有什么区别呢?
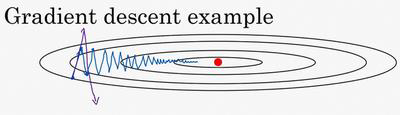
让我们通过下图进行了解:
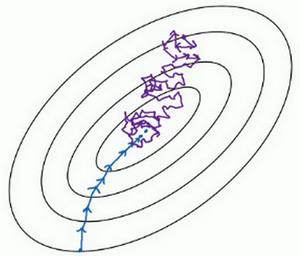
如上图所示,相当于上面三维图像的俯视图,其中中点为最优点,蓝色线是batch梯度下降的收敛曲线,紫色是随机梯度下降算法的收敛曲线。通过两条线对比可知,batch梯度下降是严格按照最优点的方向一步步稳稳的收敛的,但是随机梯度下降却显得很随意,因为单个样本点可能存在很大的噪声,有时反而向相反的方向收敛,但是整体来说还是想最优点的方向收敛点的。还有一些信息,上图没有表达出来,就是随机梯度下降虽然走了许多弯路,但是使用的总样本数和消耗的时间是小于batch梯度下降的。
因此,在样本数量极多,或者是我们想要消耗较少的资源,在尽可能短的时间收敛的话,随机梯度下降是个不错的选择。但是随机梯度下降真的没有什么缺点吗?
当然有,我们观察上图,蓝色曲线逐步到达最优点,然后稳住不动;但是蓝色曲线,也就是随机梯度下降的曲线却在最优点周围不断绕圈圈。是的!我们没看错,随机梯度下降是不会收敛到最优点然后不变动的,因为单个样本存在很大的噪声,他很难收敛到最优点。
总结:batch梯度下降一次性训练所有的样本,在样本数量大的时候消耗很大的资源,但是收敛很稳定;随机梯度下降算法每次使用单个样本进行训练,虽然下降的过程有点曲折,但是依旧朝着最优点的方向前进,使用的资源和消耗的时间相对较少。
仿佛这两种优化算法处于两个极端,有没有更好的算法呢,即不使用大量的资源去训练$m$个样本,又能消耗较少的时间,达到最优点。
当然是有的!
3. mini-batch梯度下降
如名字所代表的含义,mini-batch(小批量)梯度下降,即每次使用的样本数量既不是$m$个,也不是1个,它$1<minibatch<m$。
我们在真实的场景中描述mini-batch算法:
加入当前我们的样本总数为500万个,如果使用500万个样本进行batch梯度下降,会消耗大量的资源和时间,但是随机梯度下降又很不准确,那么我们可以使用1000个样本训练一次,此时公式3改写成:
\[J(w,b)=\frac{1}{1000}\sum_{i=1}^{1000}L(\hat y^{(i)},y^{(i)})\]我们将样本分成$5000000/1000=5000$份,当我们将所有的样本更新一遍后,即进行1epoch的训练后,我们的参数实际更新次数为5000次。
具体想过应该怎样呢?我们同样使用图来表示:
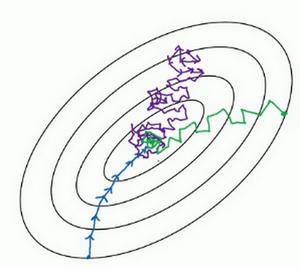
上图在batch梯度下降(蓝色)和随机梯度下降(紫色)的基础上,增加了mini-batch梯度下降的收敛曲线(绿色)。通过图片我们可以看出,它不如蓝色曲线平稳,却比紫色曲线更稳定,并且消耗的资源和时间小于紫色曲线。实际上,mini-batch的大小是一个超参数,我们可以通过控制这个超参数的大小,来实现资源和性能的平衡。
到此处,我们一共学习了三种优化算法,实际上,我们可以将他们看成一种优化算法,他们的核心就是公式2,通过梯度(斜率、导数)来进行参数的更新。
并且,batch梯度下降、随机梯度下降、mini-batch梯度下降是没有严格的优劣的,当mini-batch的大小等于m时,他就是batch梯度下降算法;当mini-batch的大小等于1时,他就是随机梯度下降算法。
对于上述三种算法的选择我们可以参考样本集的大小,如果样本集较小(小于2000),我们可以使用batch梯度下降法;如果样本集很大,我们可以考虑使用mini-batch梯度下降算法,mini-batch的数量一般为$2^n$,在64到512之间。
知识储备:指数加权平均
指数加权平均,在统计学中也叫指数加权移动平均。
核心公式:
\[v_t=\beta v_{t-1}+(1-\beta)\theta_t\]我们来解读一下公式6,其中$v_t$表示t时刻的加权平均数,$\beta$表示超参数,$\theta_t$表示$t$时刻的实际值。
我们使用具体的场景来进行解读:
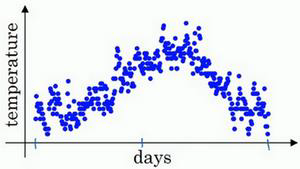
如上图所示,横轴表示天数,纵轴表示温度值,每个点就表示某天的温度值,这里有365天的数据,我们将其描画在坐标轴中。
我们按照公式2来计算每天的加权平均数,$\beta$取0.9。
\[v_0=0\\ v_1=0.9v_0+0.1\theta_1\\ v_2=0.9v_1+0.1\theta_2\\ v_3=0.9v_2+0.1\theta_3\\ v_4=0.9v_3+0.1\theta_4\\ \cdots \\ v_t=0.9v_{t-1}+0.1\theta_t\\\]通过每天的温度$\theta$计算每天的指数加权平均数,然后将计算后的值汇成曲线如下:
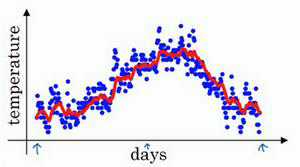
指数加权平均数在温度场景的实际意义又是什么呢?我们可以这样理解,$v_t$大概是$\frac{1}{1-\beta}$天温度的平均值(前10天),也就是红线部分所示,我们可以观察到有点右移,这就是取前10天温度的平均值作为今日温度的结果。
因为$\beta$为0.1,相当于10天的温度平均值,我们可以取大一点的$\beta$,$\beta$越大,$\frac{1}{1-\beta}$越大,平均的天数越多。
按照公式7的计算方法,我们取$\beta$为0.98,绘制曲线如下:
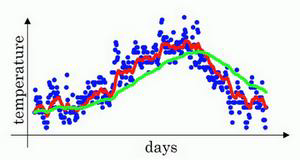
上图中的绿色曲线就是$\beta$为0.98时的加权平均数,我们可以明显看到,相比于样本数据的分布,绿色曲线向右偏移很明显,因为它平均了前50天的温度(1/(1-0.98))=50.
也许会有小伙伴好奇,如果我们把$\beta$设置的很小会怎样呢?
当$\beta$为0.5时,相当于平均了前2天的温度,经过计算,绘制曲线如下:
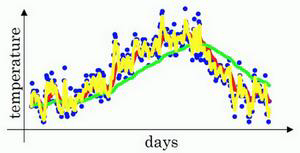
黄色的曲线即为平均前2天温度得到的,我们发现噪声非常大,但是却能够很好的适应温度的变化。
经过上述三个图的对比,说明$\beta$是一个很重要的超参数,指数加权平均的好坏很大程度上依赖$\beta$的设置。
经过上述的场景分析,大概明白了指数加权平均到底是什么,是怎样将公式应用到实际场景中的。但是我们要知道$\frac{1}{1-\beta}$只是一个近似值,这个近似值是怎样得到的呢,我们在此推倒一下。
\[\begin{align} v_t&=\beta v_{t-1}+(1-\beta)\theta_t\\ &=(1-\beta)\theta_t+\beta v_{t-1}\\ &=(1-\beta)\theta_t+(1-\beta)\beta \theta_{t-1}+\beta ^2v_{t-2}\\ &=(1-\beta)\theta_t+(1-\beta)\beta \theta_{t-1}+(1-\beta) \beta ^2 \theta_{t-2}+\beta ^3v_{t-3}\\ &\ldots\\ &=(1-\beta)\theta_t+(1-\beta)\beta \theta_{t-1}+(1-\beta) \beta ^2 \theta_{t-2}+\ldots+(1-\beta) \beta ^n \theta_{t-n}+\ldots \end{align}\]通过上式我们可以发现,无论$\beta$取值如何,加权平均数都会取之前所有的数据进行平均。那么$\frac{1}{1-\beta}$的怎么得到的呢?
我们令$\epsilon=1-\beta$,因此式13就可以改写成:
\[v_t=(1-\beta)\theta_t+(1-\beta)\epsilon \theta_{t-1}+(1-\beta) \epsilon ^2 \theta_{t-2}+\ldots+(1-\beta) \epsilon ^n \theta_{t-n}+\ldots\]可以发现$\epsilon$呈指数递减,$e$是自然算法基础之一,$(1-\epsilon)^{\frac{1}{\epsilon}}\approx\frac{1}{e}$,约等于0.34、0.35。因此,当$n>\frac{1}{\epsilon}$时,我们可以忽略后面的值。
又因为$\epsilon=1-\beta$,因此$\frac{1}{\epsilon}=\frac{1}{1-\beta}$,我们可以用$\frac{1}{1-\beta}$近似指数加权平均的值。
理解了指数加权平均的实际意义,其实就是求取一段时间的平均值,我们完全可以用一个移动窗口去缓存一段时间的值,然后进行求取,为何要如此费事使用指数加权平均。
原因是如果使用移动窗口,会占用大量的内存,在深度学习中,样本的数据量以及参数的数据量都是非常大的,相比而言,指数加权平均使用更小的空间和内存,是一个非常大的优势。
关于指数加权平均,还有一个知识点,就是偏差修正。
在公式7中,我们可以看到$v_0$在计算时取值为0,因为按照公式,它处于初始值,之前并没有温度值。因此导致$v_1$的计算结果为$0.1\theta_1$,它并没有达到我们求取平均值的目的,并且使得指数加权平均数的值很小(相比较$\theta$),从曲线中我们也可以观察到这个情况。
偏差修正就是解决这个问题的方法,它可以让初始评估更准确,具体方案是:
将v_t换成$\frac{v_t}{1-\beta^t}$,即:
\[v_t=\frac{\beta v_{t-1}+(1-\beta)\theta_t}{1-\beta^t}\]我们研究一下$1-\beta^t$,随着$t$的增加,$\beta^t$接近0,所以当t很大的时候,$1-\beta^t$约等于1,偏差修正几乎没用。这正是我们想要的,我们仅想在初期通过这种方法放大平均值。
4. 动量梯度下降法(momentum)
原理:
将指数加权平均数应用到梯度上,并利用取加权平均的梯度更新权重。
具体公式:
\[v_{dW}=\beta v_{dW}+(1-\beta)dW\\ v_{db}=\beta v_{db}+(1-\beta)db\\ W=W-\alpha v_{dW},b=b-\alpha v_{db}\]此处,$v_{dW}$与$dW$拥有相同的维数。
通过公式16我们可以发现,一共有两个超参数,分别是学习率$\alpha$和$\beta$,$\beta$最常用的数值是0.9。
关于偏差修正,我们可以使用$1-\beta^t$,但是实际在深度学习中,并不会受到偏差修正的干扰,因此可以忽略。
这是momentum算法的一种形式,实际上还有另外一种,即在公式16中删除了$1-\beta$,得到的公式是:$v_{dW}=\beta v_{dW}+dW$,实际上这两种形式的效果都不错,但是使用第二种方式会影响$\alpha$的最优质,对于调节超参数不是很方便,因此建议使用第一种。
以上就是momentum方法的公式和使用方法,但是为何将指数加权平均与梯度结合会有更好的效果呢?我们进行进一步分析。
下图为梯度下降的示意图:
红点为收敛最优值,蓝色线为我们使用mini-batch梯度下降时的下降曲线。
观察蓝色曲线,我们可以看到mini-batch梯度下降,从横轴分析,它逐渐逼近收敛值;从纵轴分析,它因为数据的噪声产生波动。
我们想要的是它尽快向横轴的方向收敛,尽量避免纵轴的波动。
我们可以通过超参数$\alpha$(学习率)进行控制吗?紫色线为实验结果,增大学习率时,它会同时影响横轴和纵轴,与我们的期望不符。
指数加权平均可以解决这个问题!!!
可以观察知识储备:指数加权平均中的图像,不正是降低纵轴上的波动,横轴上几乎不受影响。
对于梯度下降问题,使用指数加权平均后,指数加权平均在纵轴方向,会进行平均,导致正负相抵消;横轴方向都是正值,因此平均值没有太大变化。
最终的结果就是纵轴方向波动变小,横轴方向运动更快。
在横轴方向,指数加权平均实际可以理解为给了一个初始速度,,每次更新都不是独立的,因为会获取动量,这也是动量加权平均名称的由来。
5. 均方根(RMSprop)
类似于momentum,我们先介绍计算公式:
\[s_{dW}=\beta s_{dW}+(1-\beta)dW^2\\ s_{db}=\beta s_{db}+(1-\beta)db^2\\ W=W-\alpha \frac{dW}{\sqrt {s_{dW}}},b=b-\alpha \frac{db}{\sqrt {s_{db}}}\]通过公式17我们可以发现,RMSprop同样使用了类似指数加权平均的原理,与momentum的不同之处体现在两个方面:
- 计算指数加权平均数时增加了平方操作。
- 更新权值时使用$\frac{dW}{\sqrt {s_{dW}}}$的方式,而不是用$s_{dW}$代替$dW$
那么RMSprop为什么有效呢?
首先直接介绍其作用,与momentum类似,它可以减缓纵轴上的波动,同时加快,或者说不减缓横轴方向的波动。
为什么会实现上述的效果呢?同样分两步分析
- 计算指数加权平均数时使用平方操作,可以理解为增加了纵轴方向的波动值,横轴由于方向相同,平均数并没有显著的增加。
- 在更新权值时,将梯度除以$s_{dW}$的平方根。在纵轴方向,由于平方的影响,纵轴方向的平均数较大,那么作为分母,使得纵轴方向的波动反而减小;横轴方向由于平均数波动不大,因此除以平方根,对于横轴方向动作影响不会太大。
momentum与RMSprop的作用类似,可以减少纵轴方向的波动,加快或者不影响横轴方向,在使用这两种优化算法的情况下,可以加大学习率,增快学习速度。
那么这两种优化算法哪个更好呢?不要急,先看下一个优化算法。
6. Adam(Momentum+RMSprop)
直接上公式:
\[v_{dW}=\beta_1 v_{dW}+(1-\beta_1)dW\\ v_{db}=\beta_1 v_{db}+(1-\beta_1)db\\ v_{dW}^{corrected}=\frac{v_{dW}}{1-\beta^t_1}\\ v_{db}^{corrected}=\frac{v_{db}}{1-\beta^t_1}\\ s_{dW}=\beta_2 s_{dW}+(1-\beta_2)dW^2\\ s_{db}=\beta_2 s_{db}+(1-\beta_2)db^2\\ s_{dW}^{corrected}=\frac{s_{dW}}{1-\beta^t_2}\\ s_{db}^{corrected}=\frac{s_{db}}{1-\beta^t_2}\\ W:=W-\frac{\alpha v_{dW}^{corrected}}{\sqrt {s_{dW}^{corrected}}+\epsilon}\\ b:=b-\frac{\alpha v_{db}^{corrected}}{\sqrt {s_{db}^{corrected}}+\epsilon}\\\]Adam结合了Momentum和RMSprop算法,是极其常用的优化算法,本证明能够适用于不同神经网络和结构。
Adam优化算法含有较多的超参数,调优经验如下:
$\alpha$学习率需要经常调试,可以在不同的实验中进行多次调试
$\beta_1$超参数常用的值为0.9
$\beta_2$超参数常用的值为0.999
$\epsilon$常用的值为$10^{-8}$(为了避免分母为0而引入的值)
加快学习速度的另一种方法:学习率衰减
为什么学习率衰减能加快学习速度:
在学习初期,我们可以使用相对加大的学习率进行学习,在后期将要收敛到最优值时,如果继续使用大的学习率,那么将会在最优值附近摆动,很难精确收敛到最优值。因此,我们可以抛弃使用恒定大小的学习率的方法,使用一个衰减的学习率来控制收敛步伐。
在介绍多种衰减方式之前,介绍相关概念:
epoch:所有样本遍历一次叫做一次epoch
epoch-num:样本遍历的次数
decayrate:衰减率
学习率衰减的几种方式:
- $\alpha = \frac{1}{1+decayrate*epoch-num}\alpha_0$
- $\alpha =0.95^{epoch-num}\alpha_0$
- $\alpha = \frac{k}{\sqrt {epoch-num}}\alpha_0$或$\alpha = \frac{k}{\sqrt {t}}\alpha_0$
- 离散下降(每隔一段时间减少一半)
- 手动衰减
7. 结论
常见的优化算法就是以上这些(我了解的,有新的我会继续添加)
通过上面的学习,我们已经可以将其大概进行分类了。
首先是基础梯度下降的三种:batch梯度下降、mini-batch梯度下降、随机梯度下降。
实际上batch梯度下降和随机梯度下降是mini-batch梯度下降的特殊情况,至于三种算法的选择要根据具体的需求以及数据的大小来进行抉择。
然后是梯度下降上的三种优化算法:Momentum、RMSprop、Adam
Adam是Momentum和RMSprop的结合版,也是最常用的一种,他们都以指数加权平均理论为基础,可以较少纵轴方向的波动,加快横轴方向的学习速度。
另外,为了加快训练速度,我们也可以使用学习率衰减的方式,本文也提供了集中衰减方案。
在最后,想要解释一下Momentum、RMSprop、Adam这类优化算法对于局部最优问题的益处:
实际在我们训练过程,不太可能被困在局部最优中,相反,我们常见的问题是平稳段问题。平稳段存在于鞍点到最优值之间,简单实用梯度下降可能会在平稳段浪费大量的时间,使用基于指数加权平均的优化算法,可以加快走出平稳段,尽快训练到最优值。
8. Adagrad(补充)
Adagrad优化算法,全程是Adaptive gradient,即自适应梯度下降算法。
在上述的小节中,提及的GD、Adam等算法,其中的学习率$\alpha$是不变的,在第6小节最后,我们提及到了学习率衰减的方法,属于改变学习率大小的一种方式,但是其原理比较粗暴,根据时间或者轮数对学习率进行减小。
adagrad算法则是针对学习率调整更专业的一种方法,其对出现频率较低的参数采取较大的学习率进行更新,相反,对于出现频率高的参数采用较小的学习率进行更新。因此,其非常适合处理稀疏数据。
在SGD中,我们的更新公式如下:
\[W:=W-\alpha dW\\ b:=b-\alpha db \tag{8-1}\]adagrad算法对学习率进行调整:
\[W:=W-\frac{\alpha}{\sqrt{\sum_{i=1}^tdW^2}+\epsilon} dW \tag{8-2}\]我们从两个角度进行分析:
- 从时间的角度,当更新次数变多时,增加的分母不断变大,导致学习率不断变小,这在一定程度上是合理的,类似于学习率衰减
- 从不同参数的角度,对于不同的参数,在之前的时间步中更新频率越高,分母越大,我们给予其较小的学习率,也符合我们的目的,解决稀疏数据的问题。