时间差分学习(TD)是强化学习独特的核心思想,TD结合了DP方法和MC方法的思想。
TD可以从原始经验中学习,不需要知道环境模型,这一点和MC方法很类似,MC方法也是不需要清楚知道环境模型;TD不需要仿真出完整的轨迹,直接利用其它状态的估计来更新当前状态值,这一点和DP方法很类似,即需要自举。DP、MC、TD方法之间的关系是强化学习理论中反复讨论的主题。
关于具体方法,其实都是广义策略迭代的思想,在预测阶段,即值函数评估,三种方法各不相同,DP使用贝尔曼方程,MC使用采样回报均值,TD即将进行介绍;在控制阶段,即策略提升,都是用贪婪测试完成策略提升环节。
1. 时间差分预测
TD方法和MC方法都是用经验来估计值函数。
在MC方法中,状态$S_t$的值函数表达式为:
\[V(S_t) \leftarrow V(S_t) + \alpha[ G_t - V(S_t)]\tag{1-1}\]公式1-1中,$G_t$表示从$S_t$后直到episode结束后得到的回报总和。因此,更新状态值函数,必须等到一个episode结束才行。而TD方法只需要等到下一步,在$t+1$不,就能利用$R_{t+1}$计算一个有效的更新目标。
公式为:
\[V(S_t)\leftarrow V(S_t)+\alpha[R_{t+1}+\gamma V(S_{t+1})-V(S_t)]\tag{1-2}\]公式1-2所示,TD方法和MC方法的不同就是,MC的更新目标为$G_t$,TD方法的更新目标为$R_{t+1}+\gamma V(S_{t+1})$,TD的这种方法叫做TD(0),或者叫一步TD(one-step TD)。
更新公式1-2的策略预测伪代码为:
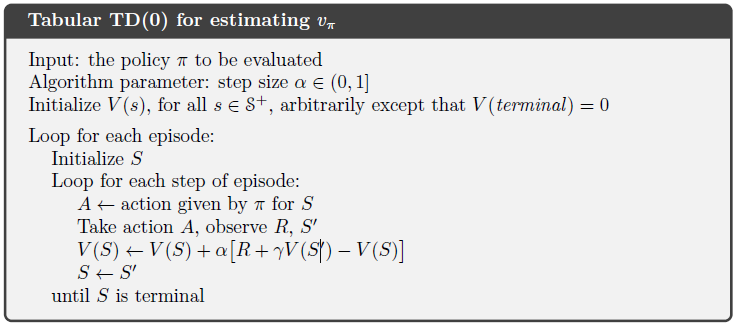
公式1-2所显示的方法称为自举,我们看一下其推导:
\[\begin{align} v_{\pi}(s)&=\Bbb E_{\pi}[G_t \mid S_t=s]\\ &=\Bbb E_{\pi}[R_{t+1}+\gamma G_{t+1} \mid S_t=s]\\ &=\Bbb E_{\pi}[R_{t+1}+\gamma v_{t+1} \mid S_t=s] \end{align}\tag{1-3}\]状态值函数的估计是一个期望,因此MC采取采样回报均值的方法估计其期望值;DP方法因为已知环境模型,因此求解期望不是问题;至于TD方法,即采样,又估计。
我们再来看一下TD(0)的备份图:

通过备份图可以发现,其只有一个分支,因为使用的是采样的方式,称之为采样更新;DP使用期望更新,其使用所有可能的后续状态的分布;MC方法使用采样更新,但是它是完整一条分支,而不是TD这样,使用自举,仅观测一个状态。
在TD(0)更新中,当前估计$V(S_t)$与估计目标$R_{t+1}+\gamma V(S_{t+1})$的差别,称作TD误差(TD-error)。
TD误差表示为:
\[\delta_t \doteq R_{t+1} + \gamma V(S_{t+1}) - V(S_t) \tag{1-4}\]RL中,TD误差有很多不同的形式,不同的形式演化出不同的算法。
MC误差也可以转换成TD误差的格式:
\(\begin{aligned} G_{t}-V\left(S_{t}\right) &=R_{t+1}+\gamma G_{t+1}-V\left(S_{t}\right)+\gamma V\left(S_{t+1}\right)-\gamma V\left(S_{t+1}\right) \\ &=\delta_{t}+\gamma\left(G_{t+1}-V\left(S_{t+1}\right)\right) \\ &=\delta_{t}+\gamma \delta_{t+1}+\gamma^{2}\left(G_{t+2}-V\left(S_{t+2}\right)\right) \\ &=\delta_{t}+\gamma \delta_{t+1}+\gamma^{2} \delta_{t+2}+\cdots+\gamma^{T-t-1} \delta_{T-1}+\gamma^{T-t}\left(G_{T}-V\left(S_{T}\right)\right) \\ &=\delta_{t}+\gamma \delta_{t+1}+\gamma^{2} \delta_{t+2}+\cdots+\gamma^{T-t-1} \delta_{T-1}+\gamma^{T-t}(0-0) \\ &=\sum_{k=t}^{T-1} \gamma^{k-t} \delta_{k} \end{aligned}\tag{1-5}\) 当然,公式1-5的前提是,$V$在一个episode中不改变。而实际中,V在episode中肯定是变化的,所有只能说公式1-5近似成立。
2. TD预测方法的优势
TD方法估计状态值函数是依赖于其他状态值函数的估计的,相当于从一个猜测估计另一个猜测。
我们来看一下TD方法的优势:
- 不需要环境模型
- 相比于MC方法,TD方法本质上能够以增量的、在线的方式实现。MC方法只能在一个episode结束后才能执行更新,对于很长的episode,甚至没有episode的连续任务,MC方法的劣势是很大的。
- 一些MC方法必须忽视或者折扣一些episode(包含待试验动作),会降低学习速率。TD方法则不受这种影响。
TD方法在步长参数足够小,且遵循公式1-2的更新规则,TD(0)方法能够被证明收敛到$v_{\pi}$
在实际中,TD方法在随机任务上比同样学习步长($\alpha$)的MC方法更快。
在经验较少时,即episode的数量较少时,我们可以使用类似于深度学习中epoch的思想,多批次的使用经验进行更新。在TD中,这种方法叫做批更新,具体方法为,使用公式1-2,不在每一步进行更新,而是等所有经验遍历完后,再一次性的更新,如果在所有经验中,一个状态出现多次,更新就是各个增量的和。
在批更新中,在超参数$\alpha$足够小的,TD方法和MC方法都能收敛到最优解,但是TD方法比MC方法要好,因为MC的方法只有在特定情况下才是最优的,TD的最优则依赖于预测回报。
另一个方向理解,就是MC方法过拟合了,TD方法训练误差和测试误差,因此过拟合可能性比较小。
总结上述内容,就是MC方法试图找到训练集上误差最小的估计,TD则是试图找到一个估计值,这个估计值相对于马尔科夫过程的最大似然模型时最优的。如果最大似然模型是精确的,那么TD方法得到的估计也是准确的,这是确定性等价估计。
3. Sarsa:on-policy TD
第1、2小节介绍如何使用TD方法评估值函数,即预测问题;本小节介绍使用TD法进行策略提升,即控制问题。
TD方法同样分为两类:on-policy、off-policy
在第1、2小节,我们策略评估的是状态值函数,但是在不知道环境模型的情况下,我们没法使用状态值函数转换成对应的策略。因此,需要使用动作值函数。
使用TD(0)方法估计动作值函数的公式如下:
\[Q(S_t,A_t)\leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma Q(S_{t+1},A_{t+1})-Q(S_t,A_t)]\tag{3-1}\]通过公式3-1,发现动作值函数的更新方式和状态值函数的更新方式相同,它完全使用了五元组信息$(S_t,A_t,R_{t+1},S_{t+1},A_{t+1})$,这也是算法名称Sarsa的由来。这样一个五元组也叫作一个转移(transition)。
下面我们来看一下Sarsa算法的伪代码:
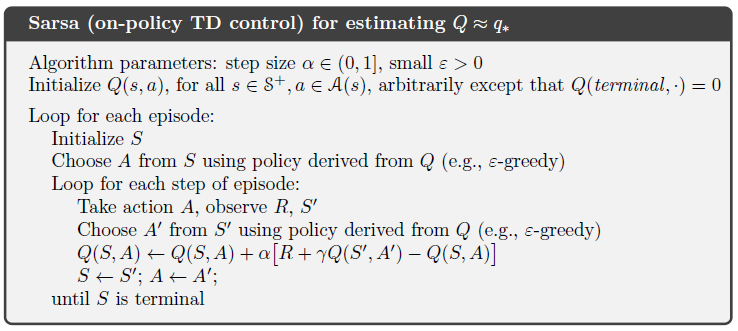
在上述伪代码中,实际上并没有显式的策略提升的代码,原因是代码提升相当于当前策略的贪婪策略,$\epsilon$-greedy就是相对于$\epsilon$-soft 的贪婪算法,直接在选择动作时使用贪婪策略。
4. Q-learning:off-policy TD
上一小节讲了一种on-policy的基于TD的算法,叫做Sarsa,本小节讲一种off-policy的基于TD的算法,叫做Q-learning。它是强化学习的一大突破,形式简单,但影响深远。
Q-learning的更新公式如下:
\[Q(S_t,A_t)\leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma \max _aQ(S_{t+1},a)-Q(S_t,A_t)]\tag{4-1}\]公式4-1的更新过程和Sarsa算法很类似,但是却有本质不同:
- 从公式看,Sarsa的更新目标是下一个状态动作对的Q值,在Q-learning中是最大化Q值操作。
- Q-learning取的是最大化Q值,实际上,这个动作并没有执行,即行为策略并没有执行,因此行为策略和我们的目标策略没有必然的联系,所以它是off-policy的。
- 通过公式4-1,最终的策略逼近于最优值函数$q_{\ast}$,而不是当前的值函数$q_{\pi}$。类似于Sarsa。
当然,在之前提过,我们的行为策略要能探索到所有的状态动作对,并且学习率$\alpha$足够小且满足随机近似条件,那么可以证明Q-learning算法能够以概率1收敛到$q_{\ast}$
Q-learning算法的伪代码如下:
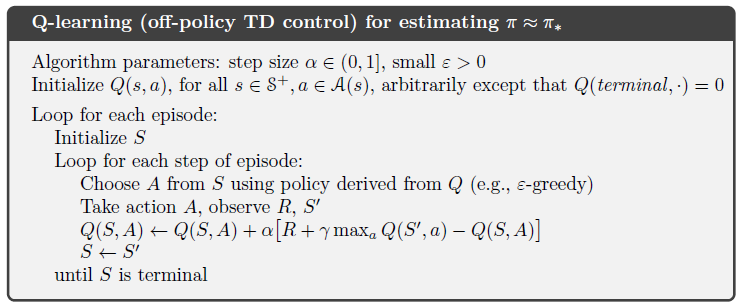
在伪代码中,实际上并没有显式的使用两个策略(行为策略、目标策略),但是在关键步骤的更新中,优化的策略和行为策略并不一定相同,因此,也是off-policy的。其他大体逻辑与Sarsa类似。
5. 期望Sarsa算法
我们把Q-learning算法中,状态动作值函数的最大值,变为求期望,看一下公式:
\[Q(S_t,A_t)\leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma \Bbb E[Q(S_{t+1},A_{t+1})\mid S_{t+1}]-Q(S_t,A_t)]\\ \leftarrow Q(S_t,A_t)+\alpha[R_{t+1}+\gamma \sum_a \pi(a \mid S_{t+1} )Q(S_{t+1},a)-Q(S_t,A_t)]\\ \tag{5-1}\]在公式5-1中,我们将更新目标变成期望的形式,因为它的形式和Sarsa一样,更新目标是Q的期望值,因此叫做期望Sarsa算法。
实际中,期望Sarsa的效果比Sarsa的效果好一点,但是相比较而言,计算量更大(期望值)。
6. 最大化偏差 + Double Learning
在DP、MC、TD方法中,都遵循广义策略迭代的思想,在GPI中,策略提升往往是使当前的策略贪婪,在Q-learning中取最大动作值,以及Sarsa中使用贪婪的算法选择动作。这种贪婪,也就是最大化的操作会导致严重的正向偏差,称之为最大化偏差。
对于最大化偏差的理解:
假设对于一个状态s,有很多动作a可以选择,每个(s,a)的真实值都为0。但是由于估计偏差或者不准确性导致估计的值Q(s,a)大于或者小于0,再对其做最大化操作,就得到了一个正值,这时对于真实的值0,是一个正向偏差。
我们观察一下Q-learning算法,当前的更新目标为$R_{t+1} +\gamma \max_a Q(S_{t+1}, a)$,在更新目标中,我们需要知道两个条件:
- 真实的$Q(S_{t+1},\cdot)$
- 哪个动作使得$Q(S_{t+1},\cdot)$最大
在Q-learning中,我们使用相同的数据来估计这两个条件。相当于在最大化偏差($Q(S_{t+1},\cdot)$)的基础上又做了最大化操作,相当于错上加错。于是,我们将这个过程分开,使用两个估计值分别计算需要的两个条件:
同时估计两个值$Q_1(a)$和$Q_2(a)$,其中一个用来选择最大化值的动作,即$A^\ast = \arg \max_aQ_1(a)$;另外一个计算具体的动作状态值,即$Q_2(A^\ast) = Q_2(\arg \max_a Q_1(a))$,这样就无偏了。
以上的思想就是Double Q-learning,虽然我们有两个估计,但是计算量并没有增加,只是需要增加一倍的内存进行存储,对于使用网络近似值函数的情况,就是多了一个网络。
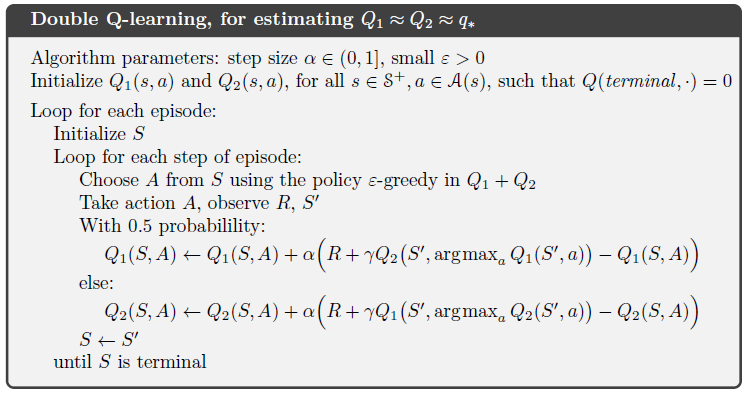
Double Q-learning的更新公式如下:
\[Q_1(S_t, A_t) \leftarrow Q_1(S_t, A_t) + \alpha \left[ R_{t+1} + \gamma Q_2(S_{t+1}, \arg \max_a Q_1(S_{t+1}, a) ) -Q_1(S_t, A_t) \right] \tag{6-1}\]我们使用0.5的概率使用公式6-1更新$Q_1$,另外的0.5概率更新$Q_2$,伪代码如下:
7. 总结
TD方法是RL中使用最广泛的,因为他们比较简洁、可以在线更新、计算量小。上述的内容都是单步的、表格式的无模型TD算法。
当TD方法引入值函数近似,就和深度学习神经网络发生联系,例如Q-learning与DQN,Double Q-learning与Double DQN等等。
上述内容主要参考《Reinforcement Learning An Introduction》一书。